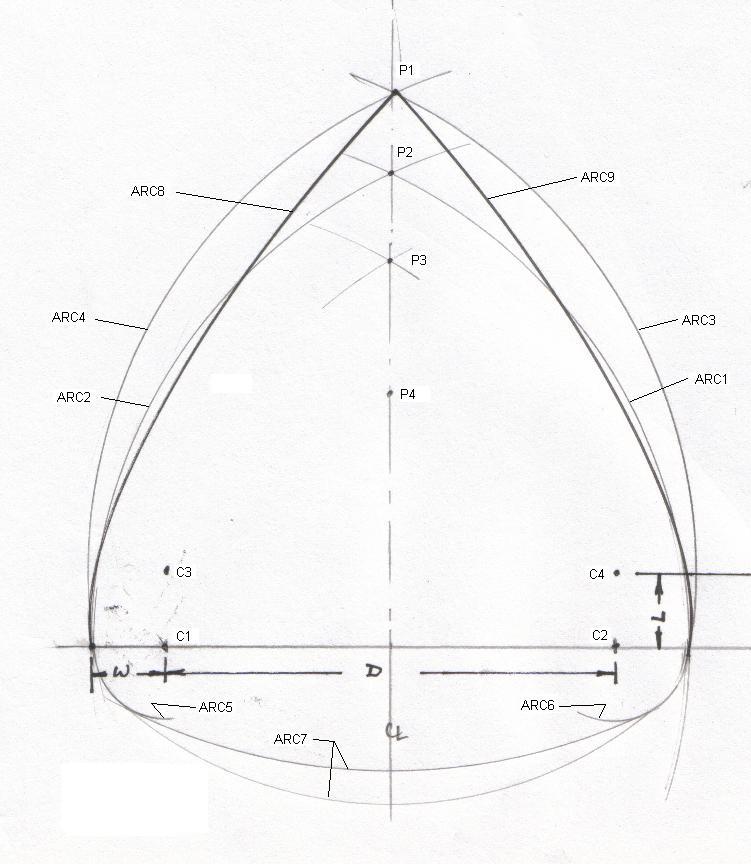
In the diagram above,
- C1 and C2 are where the wheels or motor shafts touch the ground. The bot pivots at approximately these points during a "pop"
- C3 and C4 represent the "lead distance", L This is an arbitrary distance that gives the bot a more elongated shape which is aesthetically more pleasing and improves obstacle clearance. A longer lead increases the torque required to swing the front of the bot, however, and reduces efficiency. The value of L should probably be no more than one quarter of the distance (D) between the wheels and no less than one sixth.
- D is the distance between wheels or motor shafts. The greater this distance, the shorter the arc defined by each pop, but the greater the torque available. Too small a distance and the bot has an excessive waggle and overshoots the light source. Too great a distance and the bot is slow. There must be some formula to calculate the optimal distance. Other factors that affect this include the diameter of the wheel or shaft covering, the number of motor turns per pop, and the overall weight of the bot.
- W is the edge width of the bot, from C1 or C2 to the edge of the chassis. An arbitrary amount, but choose the minimum that will provide strength, mounting room, etc.
- Arcs 1 and 2 have a radius of (D +W) and is centered at C1 and C2 respectively; they intersect at point P1
- ARC3 and ARC4 are radius (D+W) centered at C3 and C4 respectively and intersect at point P2
- Arcs 5 and 6 are radius W and centered at C1 and C2 respectively.
- ARC7 is centered at P1 and tangent to Arcs 5 and 6. This shape of the rear of the chassis is arbitrary but aesthetic. The center of ARC7 could be anywhere down the center line of the chassis, such as P4, so long as the arc is tangent to Arcs 5 and 6. The shape of the rear of the bot (except for arcs 5 and 6) can be just about anything.
- Arcs 8 and 9 were drawn arbitrarily with a French curve to reduce the rather chubby outline of the bot and give a sleeker shape. Any curve that lies within arcs 3 and 4 and outside arcs 1 and 2 will perform well.
- The final shape of the chassis is defined by the following arcs: 5, 6, 7, 8, and 9
- The front skid or idle wheel is located at P3, which is the apex of an equilateral triangle with sides D long.
Suppose you have a free-formed Fred that works well but you want to convert it to a this chassis. First, understand that adding weight will probably reduce performance. Your reason for doing this is to improve obstacle avoidance.
- Measure the distance between the motor shafts where they touch the ground.
- Also measure the distance covered by a single pop for each motor (the arc distance) and
- Check the location of the front skid relative to the baseline between the two motor touch points.
Lay out the proposed chassis full-size on light-weight cardboard and cut it out. Place the cardboard template on a smooth surface and set it with its right edge up against an obstacle such as a small wood block. Hold a straight pin through C1 and rotate the template in a short arc representing a pop by the right motor. The bot pivots around C1and away from the obstacle. Move the pin to C2 and rotate the template, representing a pop by the left motor. If the template again strikes the obstacle, pin C1 and repeat until the template has cleared the obstacle. This represents the number of pops required for avoidance with no tactiles.
Repeat the above but keep the pin at C1 and rotate the template in several short arcs. You will see that at some point the template will clear the obstacle if it pops the other way. You can use this information to design the length, shape, and location of your tactile sensors.
Transfer your template shape to your chassis material (I prefer light gauge aluminum but Sintra works) and mark points C1, C2, and P3. Cut out the chassis and file or sand smooth. Cut the motor slots and mount the motors in suitable way, ensuring that the shafts or wheels are correctly located the proper distance apart and that they contact the ground immediately below C1 and C2. Mount a low-friction skid at P3 (an old diode or dead LED is suitable, or make yourself a miniature ball caster ) http://www.solarbotics.net/starting/200209_ballcasters/200209_ballcasters.html.
Here is an example of a bot made with a similar shape. The top shows the shape of the chassis and white tactile sensors. The bottom shows details of the sensor switches. The motors are screwed to small flaps of aluminum bent down from the chassis (I always save the little mounting screws when I salvage a motor).
T. Gray
March 2004
Rev. Feb. 27, 2005, 2004
{kind=link}
{kind=link}